In this article, we’ll be discussing an Electric Twist-Grip Operating Device by Shimano, US Patent 10,889,346. The publication date is Jan 12th, 2021 and the filing date is Aug 18th, 2017.
This is another patent to support the wireless system that Shimano has been developing, and helps create a good visual representation of what some of the components may look like.

Brief Summary (tl;dr)
Shimano have introduced a new wireless twist-grip system that utilizes a twisting part and a joystick part. The twisting part has position sensors that shift the gears, just like a traditional cable-driven system, and the joystick part is thumb-actuated to move a dropper post or adjust the suspension. But, any of these actuation methods can be adjusted to move any component. For example, the twisting part can adjust the dropper if the rider wants it to do that.
Background
Twist-grips used to be hot-shit back in the day. According to Wikipedia, the first twist-grip was used on the Roper Steam Velocipede in 1867. There are a lot of people that still swear by them, but they’ve fallen from grace for the (speculating) more reliable and less intrusive thumb shifters and dropper controls. Shimano are still making these for the die-hard riders, and I’ve even seen them on some bikes on the XC circuit. But, there was nothing like going elbow up, ripping through gears like you’re on an MX bike.

Historically, on bikes, twist-grips were used nearly exclusively to change gears and have been super simple. There’s a cable in the grip, attached to a derailleur, that both gains and releases tension as the rider turns the inner part of the grip. This cable tension then moves the derailleur and you shift, easy-peazy. Shimano are still making them, with the XO for example.
Intro
Shimano are introducing a twist-grip to control shifting, a dropper, and the suspension at a flick of the wrist. The twist-grip part sends one signal to your components, such as a derailleur, and a little microswitch sends another signal to other components, such as a dropper or shock.
Shimano state a lot of flexibility in this system. Any of these movements can control any of the components. So, if you want your twist-grip part to control the dropper, you can do that. Or if you’d rather have it control your shifting or suspension, you can do that too. Choose your flavor.
Intended Novelty
This is another patent where the intended novelty is very precise. It appears the novelty of this invention is the use of two signals from a single twist-grip unit, a first and a second signal. The first signal can control one component, and the second signal will control another component.
In short, the first signal from a twisting action will change gears, and the second signal from the microswitch will move a dropper post.
Why
Dear Shimano Overlords, why are you doing this? Please tell us. Bless.
I recently wrote an article about Shimano’s wireless system they’re developing. There’s no doubt in my mind that this system will, in part or whole, be implemented on their new wireless components. In fact, they use the word ‘wireless’ 22 times in this patent.
What
This is a fairly straightforward system. Figure 3 shows an example handlebar set up with these new twist-grips 10A and 10B, and a cycling computer CC. We’ll go more into the cycling computer later in this section.

It’s important to note that this system can be entirely wireless:
…the first electric twist-grip operating device 10A includes a wireless transceiver WT (i.e., a communication device) that carries out two-way wireless communications between the electronic controller 18 and the height adjustable seatpost SP, the front suspension FS and/or the rear suspension RS and the rear derailleur RD.
Figure 4 shows an exploded view of the twist-grips. Two electronic parts send two different signals in a single grip; the rotary operating unit 20 and the switch 22. The rotary operating unit 20 twists around an indexing unit, which includes a position sensor. The indexing unit is just a set of teeth to keep the twist-grip in place.

Shimano have another example (below), where the twist-grips don’t have the indexing unit. Rather, there are biasing springs (S1 + S2 below) that bias the twisting part of the grip to a central rest-position. In short, this just means the twist grip moves in a similar motion to a motorcycle throttle, and returns back to a rest-position. There are microswitches at either end of the twist-grip and the grip will change gears/move the dropper/etc. by touching those microswitches.

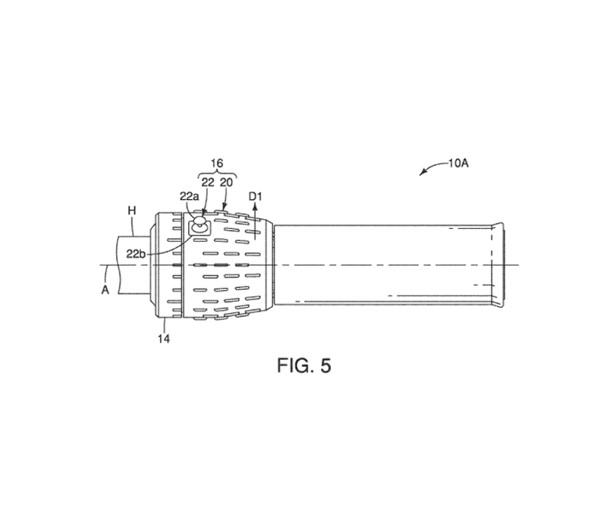
Back to the figure 4 example, figures 5 and 6 below show directions D1 and D2, which are the directions in which the grip can shift, obviously. The position sensor is programmed to recognize the position of the twist-grip relative to the handlebar. In an example scenario, each position of the twist-grip relates to a position of a derailleur. So, as you twist, the system will recognize the position, send a signal to a wireless controller, which tells the derailleur to shift. Note how the switch 22 moves with the twist-grip itself.

The second electronic part of the shifter is the switch 22, shown in figure 9 below. This is a microswitch inside the twist shifter itself, and it moves in 3 axes. The rider can move it left/right, in/out, and push it in, so there’s quite a bit of potential control. Shimano are calling this a ‘joystick’ and are saying it’s preferable to use your thumb.
Shimano state that this microswitch can control the seat post, front suspension, or the rear suspension; depending on what the rider wants to control.
…the [switch] 22 can be set by the user to operate any one of the height adjustable seatpost SP, the front suspension FS and the rear suspension RS.
Additionally, Shimano state that the positions of each of your components can be displayed on the cycling computer.
The user’s selection of one of the electric telescopic apparatuses SP, FS and RS can be displayed on the cycle computer CC.

So, here’s the really interesting part of this for me. A while back, I wrote another article about a motorized dropper post that Trek has been developing that utilizes a screw-type linear actuator to moves the seat post up and down. This type of design will allow a user to move the seat without having to actually sit on the seat. LOOK WHAT IS IN THIS PATENT! A SCREW-TYPE LINEAR ACTUATED DROPPER POST! That might be a bit much…

Tinfoil hat time. Unless Shimano will/have developed a very similar design at the same time as Trek, I’m going to say this system can be used in conjunction with Trek’s system. Maybe they were developed together. I spent some time going through Shimano’s patents and I can’t find anything that shows them making a screw-type dropper, but that doesn’t mean I didn’t miss it (they have so many patents) or one isn’t coming. But more realistically, this design is just the obvious next step.
As far as suspension adjustment goes, there are a few Shimano patents that relate to suspension adjustment, like stroke control, damper control, etc. This twist-grip system can also adjust your suspension settings. They use ‘damping characteristics’ as an example, but this system could adjust any number of suspension dials.
When the rotary operating member is rotated… the front suspension FS or the rear suspension RS is operated between a plurality of damping characteristics.
There’s also a line that state the switch can toggle an automatic mode for your suspension:
…the front or rear suspension FS or RS can be set to the automatic mode via operation of the additional operating member 22 in the fifth direction D5. In the automatic mode, the bicycle control system 12 can automatically adjust the front or rear suspension FS or RS to change a damping characteristic based on a current road condition. In particular, in the correspondence tables, the damping characteristic of the front suspension FS and the rear suspension RS can be changed between lock (little to no damping), middle (partial damping), and open (full damping) conditions, while the stroke length can be changed between short and long. A lock state is a firm state as compared to an open state. For example, when the bicycle control system 12 determines that the bicycle is ascending, the front and/or rear suspensions FS and/or RS are placed in the lock state (firm state).
Figure 2 is a block diagram of how Shimano think this system should work. There’s a left and right (first and second) twist-grip that contains a controller (18), position sensor, power supply, operation devices (twist and switch), and a wireless transceiver. These twist-grips communicate directly to your components, depending on how the system is programmed.

Lastly, I’d like to note that Shimano also state the twist-grips themselves may not have a wireless system, and may communicate with the cycling computer CC, where the cycling computer can communicate wirelessly with the components. Doesn’t really matter how the wireless system works, as long as it works.
The electronic controller 18 can output control signals(s) to the cycle computer CC, which then transmits the control signals to the height adjustable seatpost SP, the front suspension FS and/or the rear suspension RS and the rear derailleur RD.
Conclusion
I’ll say it, I think this one is going to be big. Or it’s, at least, on the right track for the electronic components that are coming out. The idea of thumb shifters were necessary to provide leverage and move a cable more easily. SRAM’s AXS system maintained the same idea for their electronic system, but the reality is, is that the thumb shifting is not necessary for leverage in an electronic system, as the motors and servos do all the work.
In the end, Shimano are introducing a very flexible system that can control a seat post, front/rear derailleurs, and front/rear suspension. With the 3-axis micro switch, there are more switches than components to control, which may lead to the switches controlling fine-tuning of the components. For example, you may be able to press the joystick in to change modes, then scroll left and right with the joystick to fine-tune your suspension characteristics.
Pretty nifty little system.







Leave a Reply