
In this article, we’ll be discussing a Vehicle Suspension Linkage by Yeti, US publication 20210171151. The publication date is June 10th, 2021 and the filing date is Dec. 5th, 2019. This has not been granted, yet.
Follow the shit-show here: https://www.instagram.com/wheel_based/
It looks like we’ve got another linkage system from Yeti. I’m not sure why, but there’s something about seeing a Yeti patent roll across my computer that gets my hyped. The guy that runs the engineering department over there is one smart bro.
And for those that are going to publish this elsewhere, I cannot believe I have to say this, but please, for the love of god, just cite me. It’s literally the bare minimum of respect for another human being doing this for free. You know who you are.
ETA: If you’re the dude that’s the named inventor and you want your name here, shoot me an email.

Brief Summary (tl;dr)
Yeti are introducing yet another 6-bar suspension system that incorporates one or both of a motor or gearbox. Just as the prior Yeti 6-bar system, this one attempts to separate kinematic dials. Yeti make it clear that anti-squat is a priority with this design and say this design will provide efficient power transfer while also providing good suspension compression during travel. The system also provides a rearward axle path at the beginning of travel. Ultimately, this system appears to have been created for the motor and gearbox, where particular instance centers are located in more ideal locations.
Background
Yeti do a great job with their patents, and this one is no different. Their technical explanations are excellent, which I’ll include right here. First, they have a simple explanation of mobility (m). The equation is:

where n = # of bodies (links/members/etc) and p = # of joints. For a 4-bar system, p = n = 4. So, m = 1. In a 6-bar system, n = 6 and p = 7. Again, m = 1. Yeti explain what this means:
In both noted 4-bar and 6-bar linkages, m=1, or there is one degree of freedom of motion. Therefore, the path of the axis of the driven wheel, known as the driven wheel axis path (DWAP) may be constrained to planar motion along a defined path or curve relative to the suspended body. This path or curve includes one end-point defined as the extended state, and another end-point as the compressed state. Any point on this curve or path between the extended and compressed points is known as an intermediate state. An intermediate state on an IVC migration curve or path correlates to an intermediate state of the linkage positions.
I’m also going to add some good info about instant velocity centers (IVC):
…this method of analysis includes a collection of the system instantaneous velocity centers (IVCs), which can be determined graphically. An IVC is a point common to two linkage bodies where there is zero relative velocity. These IVCs change location instantaneously as the suspension is cycled from its extended to compressed state. The path of each IVC migration may then be plotted graphically as a path, curve, or spline from the extended to the compressed state. These IVC curves depend upon the reference frame considered.
The number of IVC’s of a suspension system can be calculated using the equation:

where N is the number of total number of IC’s and n is the number of links (bars). In the case of a 4 bar system, there are 6 total IC’s. In the case of a 6 bar system, there are a whopping 15 IC’s.
A SIVC is a stationary IVC, which has little to no migration from extended to compressed state. This is pretty important for this article.
Dynamic instant velocity centers (DIVC) are just moving IVCs. I won’t talk about the DIVC’s because that gets way too far in the weeds for a coherent article.
Specific IVC migrations called dynamic IVCs (DIVCs) may be utilized to determine the vehicle’s dynamic response. The DIVCs depend upon the specific linkage layout but always depend upon suspended body-1 since this is the body in which a passenger or rider will be included.
They also explain anti-squat. 100% anti-squat is when the anti-squat force is equal and opposite to the load transfer force during acceleration – so when pedaling. Therefore, the system is in equilibrium, resulting in zero squat. If over 100%, the suspension extends during pedaling. If at 0% (theoretically), the suspension will squat badly under acceleration. If 0% – 100%, suspension will squat, but at a lesser degree than 0%.
Yeti say anti-squat is ideal around 100% in the first half of travel. They also say they want anti-squat to reduce through travel so the suspension can be utilized later in the travel where pedaling doesn’t occur. Feedback from driving forces is also reduced later in travel with a reduction in anti-squat during travel.
Why
Yeti make it pretty clear that they don’t like 4-bar suspension systems.
With a typical 4-bar linkage rear suspension system, the acceleration response, the deceleration response, and the mechanical advantage over the shock/damper are significantly dependent upon one another. This makes it difficult to optimize all three, and as a result these designs require compromise in the quality of the ride.
This is exactly the same reasoning as the last one. They want to separate kinematic dials. It appears as though the 6-bar system is becoming increasingly popular, with Commencal also introducing their dope-ass Supreme with a 6-bar system. Yeti have an important line about a specific result of separated kinematic dials:
…there is a lesser dependency between the position of SIVC 80 and IVC 24 at the extended state, resulting in the ability to more finely tune the suspension performance.
Another reason for this design is to introduce a more rearward axle path, which has also gained popularity in the last few years, especially with the high single pivot crowd. Shoutout to Norco for the HSP – best bike I’ve ever ridden. I miss it so much.
Here are the two lines that explicitly explain some advantages of this system and what Yeti are working toward. In short, they want a rearward axle path during axle path migration and less rearward axle path in a compressed state.
This configuration may impact the IVC migration path 72, such that the rearward path at the extended state improves the suspension’s ability to absorb bumps and is characteristic of providing a higher anti-squat percentage for pedaling efficiency in the beginning of the travel.
The less rearward path at the compressed state minimizes the amount of feedback the chain or belt directs to the suspended body 13 and is characteristic of providing a lower anti-squat percentage to minimize the anti-squat force where bump absorption takes precedence. Thus, suspension performance may be improved through the interrelationship between the 15 IVC migration paths.
Yeti also say the introduction of a motor or gearbox significantly affects the anti-squat curve, so they want to improve anti-squat with a motor/gearbox.
The specific path of the DIVC has a large influence on the form of the anti-squat response curve. The vertical position of SIVC 80 and IVC 24 with respect to the ground at the extended state greatly influence the vertical position of DIVC migration path 56 with respect to the ground. However, these may not be easily located near the driving cog axis 77 [bottom bracket] due to the large motor or gearbox envelope.
What
There is an insane amount of talk about IVC and how they’re derived with this system. Ultimately, it’s just way too much to include in this article so I’m not going to include that. I’ll just point out high-level stuff.
FIG. 3 shows this new system. Note SIVC 20 and 21. I explain their importance later on.

FIG. 4E shows the entire rear end with some derived IVCs (33 and 36). The important thing I’m noticing here is the rear triangle is not solid like the current system. There’s also no explicit switch system, though they’re still using reversing-pivots. I’m not saying they’re abandoning that system, but this is an indication that they are, at least, thinking about other systems. Also note the pivots and pivot locations in the bottom link. That’s what changes throughout this article.

FIG. 5 shows a schematic of various IVCs in the extended state. I’m looking at the migration paths 47 and 72. Note tangency line 74. It’s pointing rearward, indicating a rearward axle path at the beginning of the migration.
Additionally, migration 60 (bottom link + center link) reverses direction through travel, just like any other Yeti. They really like the reverse thing.

FIG 12. shows a slight variation, where the pivot 145 coincides with the center link and the lower link. The migration path 147 also reverses direction through the travel.

FIG. 15 shows yet another variation, where the center link is not connected to pivot 178. Note how the axle path appears to be more forward (conjecture). This follows the same concept as the prior examples but with a different kinematic structure. Again, migration 194 also reverses direction through travel.

FIG. 16B and C is where I know many of you will get excited, and many others will groan. Yeti are showing another E-bike. This design is based on the first example, which is explained above. I’m not too in-tune with the E-bike systems, so you folks can probably fill me in on who’s system this is.
The rear axle area is a little different than the first example. I am unsure as to what those circles are above pivot 325, so I won’t speculate. I’ll let you do that. I will say that this looks like it’ll be alloy, or that’s what the surfacing character lines suggest.

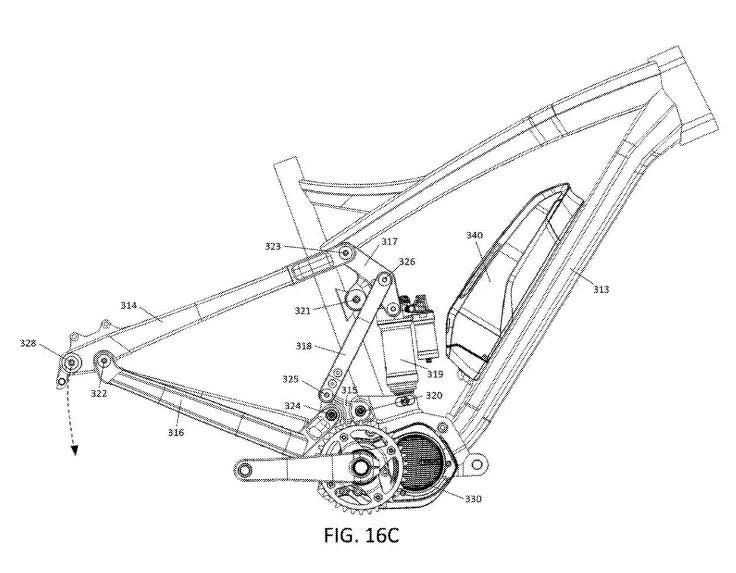
FIG. 17B shows the same bike, but with a gearbox. Yeti appear to have designed this system with a motor and/or gearbox in mind. At appears as though these SIVCs (420 below) may be located in important locations for the purpose of a motor or gearbox.
Therefore, there is a lesser dependency between the position of SIVC [420] and IVC [424] at the extended state, resulting in the ability to more finely tune the suspension performance.

Lastly, we’ll get into the kinematics of this new bike. FIG. 19 shows two examples of anti-squat curves. Curve A is a smaller driven cog (higher gear) than curve B. Driven cog is the cassette, driving cog is the chainring because I know someone will bring that up. Both curves provide a force that is opposing the weight transfer force. Yeti say:
This results in efficient power transfer during acceleration since energy is not being wasted to compress the shock/damper.
There is then a quick drop-off around sag point 612 and 613 toward the compressed state (through travel). Yeti say:
This is ideal because continuing a similar anti-squat percentage from 601 to 606 is detrimental in this portion of the travel since it would inhibit suspension compression from absorbing impacts.

FIG. 20 shows anti-rise curves. 701 is the extended state and 702 is the compressed state. They don’t say much about it, but they do say:
Anti-rise less than 100% may help improve traction while anti-rise greater than 0% may help stabilize geometry during deceleration.
Sounds like they’re more concerned with anti-squat than anti-rise, which makes sense. Pedaling efficiency is pretty important, and it’s what Yetis are known for.

FIG. 22 shows a leverage rate curve. 901 is in an extended state and 902 is compressed. Leverage rate generally falls linearly throughout travel. Yeti say:
This is preferable because the higher [leverage rate] LR in the beginning of the travel helps improve small bump sensitivity, and the lower leverage rate at the end of the travel helps prevent harsh bottom outs. In addition, the general linear trend of the LR curve provides a supported mid-stroke and the aids in shock tuning as there are no dramatic changes in the LR.

ETA: Lastly, I found this line interesting. Yeti say that changes to any of these links can significantly change how the system works. If this is true (it probably is), the freedom the designers have with this bike is pretty high. I would guess this is why 6-bar systems are starting to become popular.
Notably, changes to the basic linkage layout can have a significant effect on IVC migration paths. This in effect gives rise to many more possible IVC migration paths through the suspension travel from a fully extended to a fully compressed state.
Conclusion
I don’t really have any conclusions on this one, but I’m sure both the Yeti folk and anti-Yeti folk will lose their shit. It’s another 6-bar bike that can be an E-bike and can include a gearbox. The axle path is slightly rearward and the kinematic dials are more easily separated and it should work well with an E-bike. Anti-squat values are more ideal so it should pedal well and the designers have a shit load of freedom to design. That’s really all you need to know.
Please share this with your Yeti friends. I’m sure they’ll love knowing there’s another design that might make their bike obsolete.
If you see an error in this, please let me know. This was a tough read and I definitely could have made an error.







Leave a Reply