In this article, we’ll be discussing a Bicycle Suspension Components and Electronic Control Devices by SRAM, US publication 20210179226. The publication date is June 17th, 2021 and the filing date is Dec 17th, 2019. This has not been granted yet.
This may be one of the more important articles to come out of this website in a while. There is a lot of talk about ‘when is Shimano going to do something to respond to the AXS’ but not much about how any of the suspension companies are going to respond to Fox’s Live Valve. Well, here’s SRAM’s answer. We’ve seen a few active systems from Shimano, but those look like bullshit. This one is very real and has a much better chance of actually being implemented.
But first, if anyone knows anyone at AIM, I’d love to figure out a way to get them to sponsor this website with a DAQ system. I spent a shit load of time doing high-level aero testing and I’d love to do some bike tests and show the world how it works and how to get good data. I’ve got some cool ideas to bring some real educational data to the public on very simple bike adjustments and what the adjustments actually do. I’ve never seen anyone do that and I’ve love to bring that to this website.
Honestly, I’d love any sponsor to join. If you’d to be featured on all most posts and want to help bring great information to the bike world, please sent me a message and we can work something out. Just to be clear, I won’t give any accommodations if you have a released patent. I don’t get any permission and input from anyone to write these; that would defeat the purpose of the entire patenting system.
8/9 Update: More Vital goodness. Super Sleuth u/lickmycrinkle (lol) at vitals Tech Rumor found/took? this picture (the fork) and big brain u/icantride (also lol) found the recently released FCC filing.




6/19 Update: I posted this article on the Vital Tech Rumors thread (if you don’t follow, you should) and u/querynotfound shared this picture of a shock he saw at Trestle from 2019. Obviously, no one can say for certain that this is the same shock, but damn does it look close.

Brief Summary (tl;dr)
SRAM are introducing their own active suspension system to compete with Fox’s Live Valve system. It’s very similar to Fox’s. Active systems can’t deviate from a specific configuration (sensors, controller, actuators), so every active system we’ll see in the future will likely be very similar. Like any other system, SRAM’s takes input information from sensors on the bike, sends the information to a controller for algo-magic calculations, and outputs the calculations to the suspension actuators to control fluid flow. The cool thing about SRAM’s is that the controller, battery, and motor are all encased in a single component that attaches directly to the shock. It’s extremely compact and unobtrusive. In the end, this system attempts to do the same thing as any active system — make more grip by automatically adjusting fluid flow a zillion times per second. The best part: this is entirely wireless.

Background
An active system receives an input and then changes the way a component reacts to the input. An active system many of us deal with regularly is an All Wheel Drive (AWD) system in a car. The AWD system contains wheel speed sensors and automatically adjusts power between the wheels during a slip scenario, for optimized grip, by locking differentials (Torsen) or activating clutch packs (Haldex), among other methods.
There are two types of active systems — fully-active and semi-active. In a fully-active system, the suspension contains actuators to physically move the suspension in response to an input. We’ve seen this in F1 cars in the past, where there are inputs such as loads (aero, for example) and orientation (pitch, roll, yaw) that are parsed to output a specific ride height for the best aerodynamic position based on what is called an ‘aeromap’. An aeromap is just a 3D plot of performance vs different positions of the car. You always want a racecar in an optimal position for peak performance and an active system will position the car in the optimal position at all times.
A semi-active system, aka adaptive, does not have actuators to physically move the suspension. Rather, the system takes input from a bunch of sensors and only reacts to the inputs by adjusted things like rebound and compression circuits or air volumes, among other adjustments. The system used in both Live Valve and this SRAM system are semi-active. So, they can determine your speed, bike position, and the terrain and very quickly adjust the suspension characteristics for optimal grip. Remember, grip is a function of tire contact patch so they just want as much tire contact as possible. If the tire is in the air, you ain’t got no grip.
Alternatively, a passive system is a system that does not react to an input situation. A passive system that many others deal with regularly is a 4×4 system used in trucks. These systems have open differentials, no sensors, and locking of differentials is a manual operation performed by the driver. There are advantages and disadvantages to both systems, but I won’t discuss them here. There’s a ton of articles across the internet for that.
Intro
This particular document shows both the fork and shock sending and/or receiving wireless signals, but the actual document only relates to the shock. We might see another document for an active fork, but for now, we only have the shock. In fact, it’s possible this document will also cover the fork, but I doubt it. We’ll probably see another one.
First, Fox has their own active system will Live Valve. They also use sensors, controllers, and actuators to automatically adjust the fluid flow in a suspension component. But, Fox’s system is a little different. They have a controller mounted separately from the fork and shock, under the top tube. The controller sends adjustment information to the suspension based on sensor information and is connected to the suspension components via a wire. Wtf is this, 2008? Who uses wires? Fox does make a good point in their patents, saying the data speeds are much higher in a wired configuration.
SRAM’s system is much smaller and is integrated into the shock itself, so it’s very unobtrusive. Additionally, this system is fucking wireless. If SRAM want to keep up with Fox, they had better have figured out a way to send and receive signals at a similar frequency to a wired configuration. Otherwise, there’s a good chance this will be behind Live Valve from the jump.
Why
They don’t say an explicit reason for this new development, but it’s pretty easy to see why SRAM are doing it. Currently, Fox have the market share for active systems in bikes; there’s no one else competing. SRAM might be the only other suspension manufacturer with the knowledge and money to develop a similar system. In the end, they kind of have to make this. From a business perspective, if Fox have shown there’s an appetite for this, then why not jump in? As competition increases, technology improves, and prices reduce. We’ll be the winners in this fight, and I’m excited to see who’s system works best.
What
There are a few ingredients to an active system. We need sensors, a controller (processor + memory + algos), and motors/servos. This system has all of these.
SRAMs system has sensors on the bikes:
the bicycle 100 may have one or more sensors to measure and/or detect various parameters associated with the bicycle 100… (e.g., a speed of the bicycle 100, a pitch angle of the bicycle 100, a crank assembly torque, etc.).
SRAMs controller takes sensed information as input and then generates output commands. This line is just saying: sensor info -> controller -> algo magic -> output commands to the suspension.
…the controller 154 may automatically generate commands based on one or more sensed parameters…
And, the shock has a little motor that adjusts the damper based on the output commands from the controller.
As disclosed in further detail herein, the shock absorber 138 includes a motor that, in response to a command signal (e.g., a wireless signal), rotates the actuator 408, thereby moving the plug 900 to change the damping rate of the shock absorber 138.
Here’s a line stating that this is, in fact, active:
…the example electronic control devices may be used to automatically adjust or modify the state of the damper without physical user interaction with the suspension component.
How
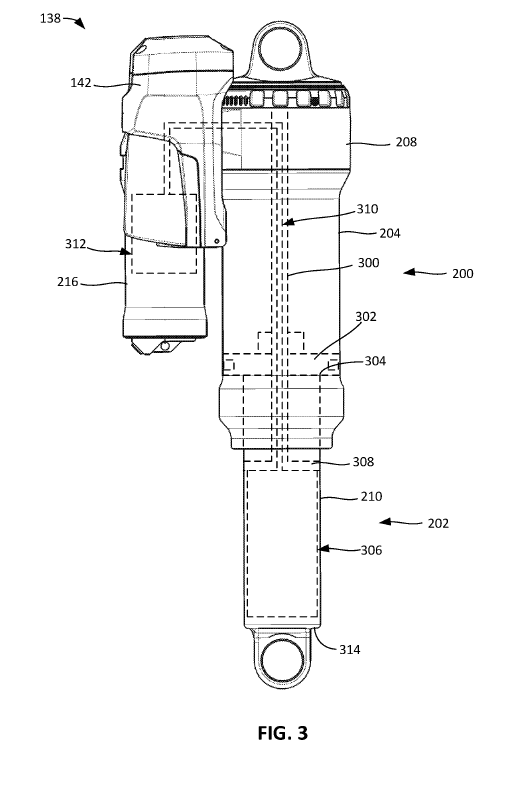
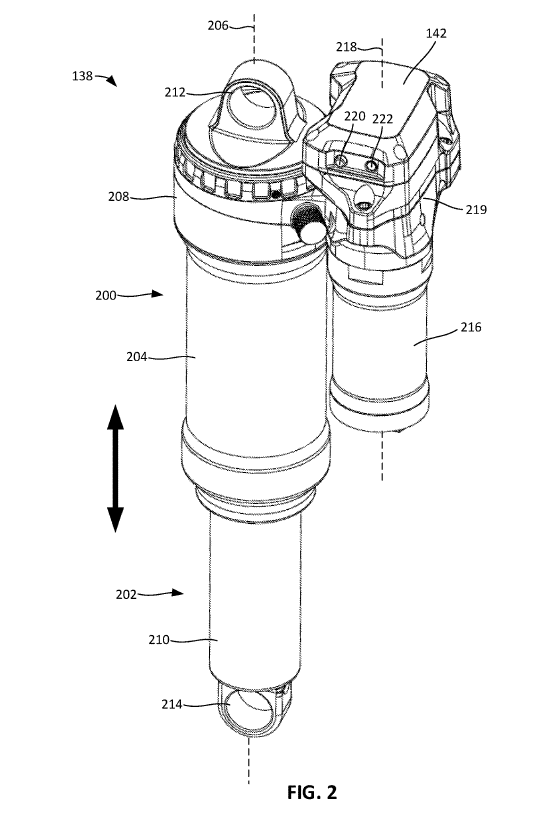
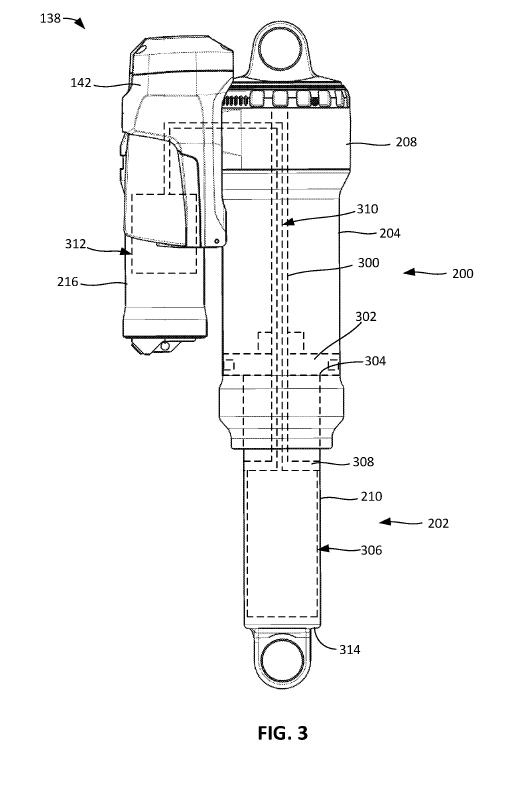
FIGs. 2 shows this new shock and FIG. 3 shows fluid communication pathways throughout the shock. 310 is the fluid path. Almost everything appears to be typical, except for that thing on top of the piggyback. Component 142 is the controller, and this will control the fluid adjustments on this shock. The wireless system, memory, processor, and motor are all inside this controller. Note the button 220. That is the activation button. You can turn the system on/off or toggle through damper modes with that button.
…[the] electronic control device 142 (referred to herein as the control device 142)… can adjust certain parameters of the shock absorber 138.
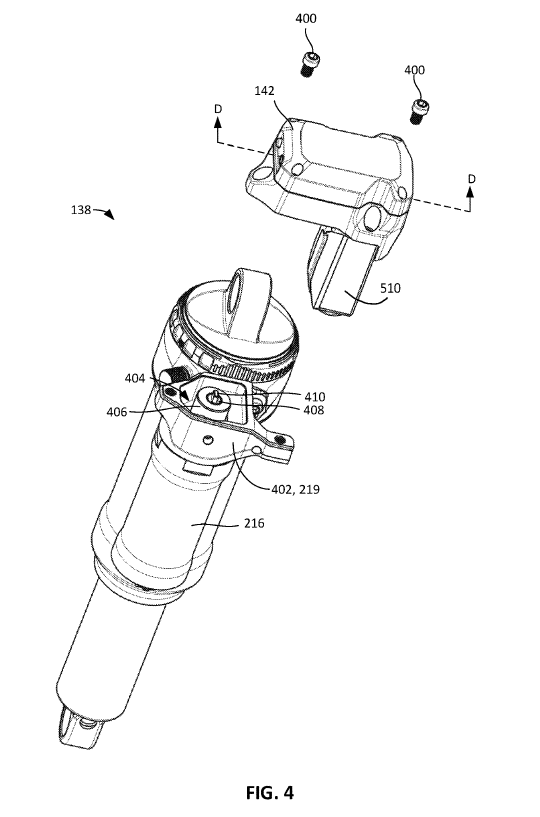
FIGs. 4 and 5 show the controller actually removed from the shock. This is actually pretty nifty. SRAM are doing this so you can replace the controller more easily, though they do say the controller can be permanent. Let’s hope we see the removable one in real-life.
This enables a user to easily replace the control device 142 with another control device without replacing the entire shock absorber 138.
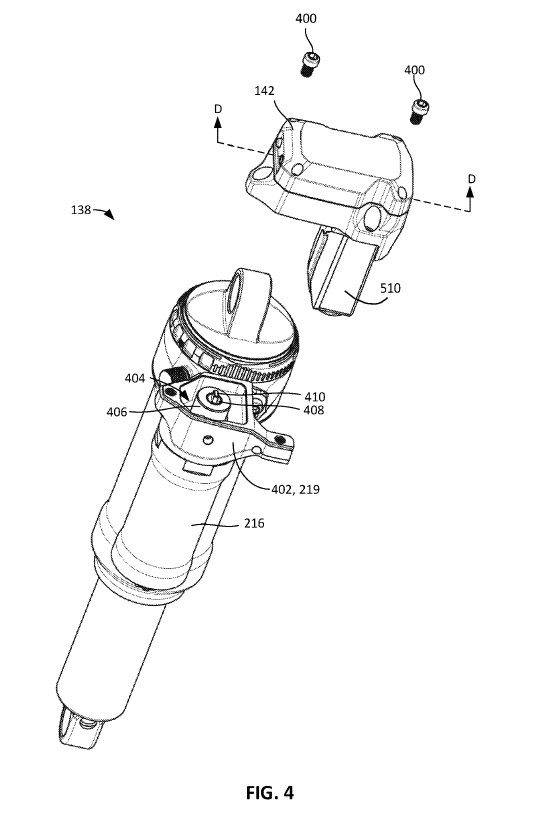
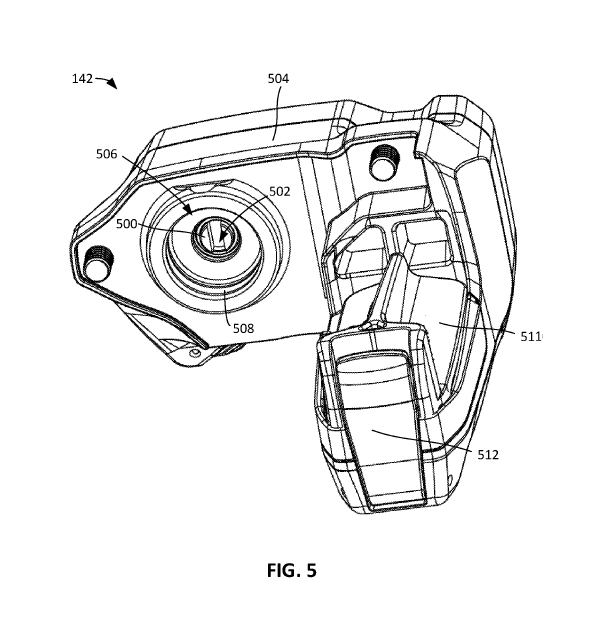
FIG. 8 shows a cross-section of the valving. I’ll be honest; there is so much shit going on here that I’m going to skip most of it. All you need to know is when the controller tells the shock to adjust damper fluid flow, the motor (not shown, it’s in the controller from FIG. 4) rotates the actuator 408, which rotates the plug 900, and the plug moves linearly, allowing more or less fluid to flow.

There is a unique feature here, where the flow control member 634 can reduce the pressure differential on the plug 900. Therefore, there is a more balanced fluid pressure in the system so it takes less force to move the plug. Check out paragraph [0088] in the spec for a deeper dive into this.
FIGs. 9, 10, and 11 show the flow control member 634. This is the part that’ll control how much fluid flows through the system.

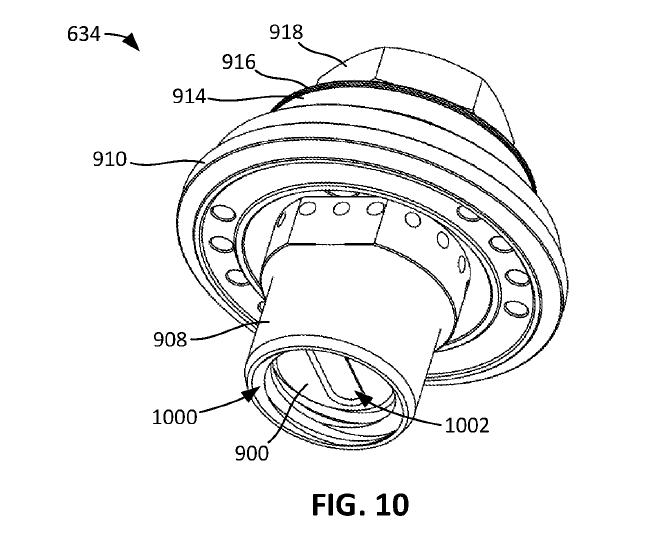
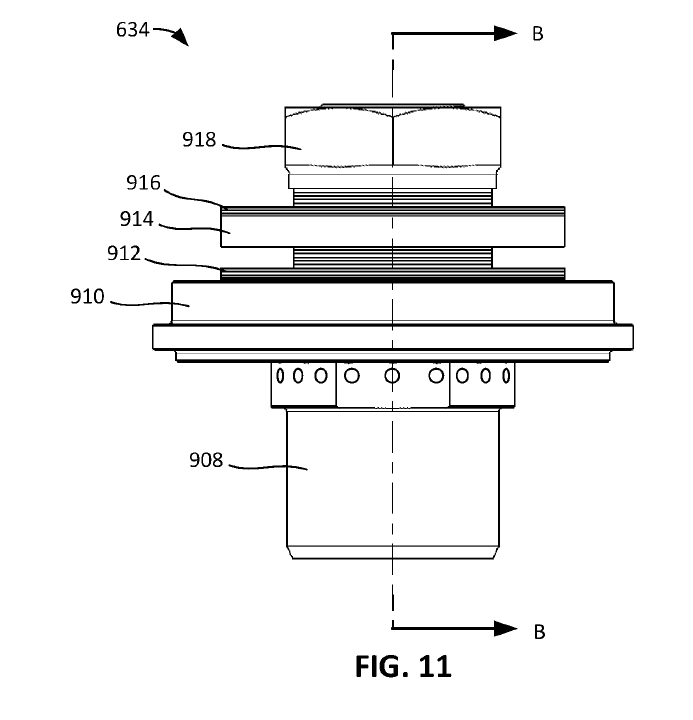
FIG. 12 shows the system fully open and the associated flow path. Path 1212 is compression and 1214 is rebound. Note how the plug 900 (look at 924) moves through the system. FIG. 13 shows the system partially open and the associated flow path. Path 1300 is compression and 1214 is rebound. FIG. 14 shows the system fully closed and the associated flow path. Path 1400 is compression and 1214 is rebound. Path 1400 is only performed if the pressure reaches a threshold, similar to any current shock. This keeps people like me from fucking up my shock when I forget to unlock it.
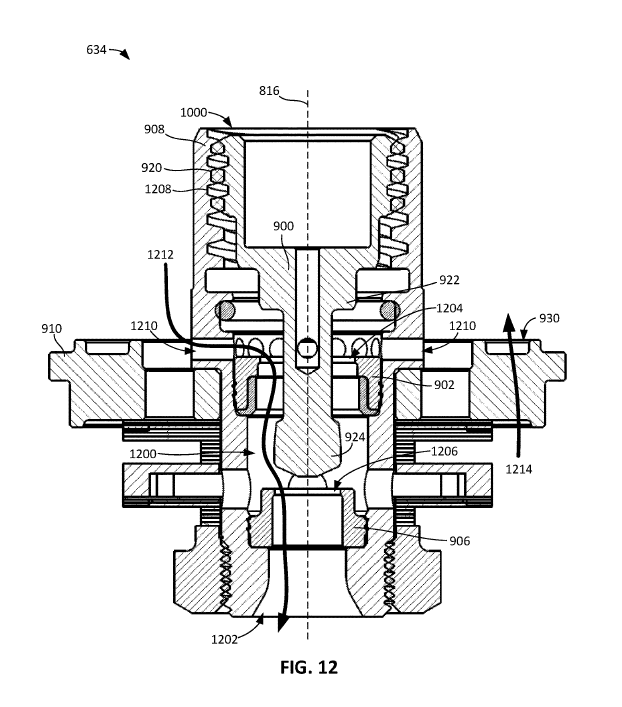
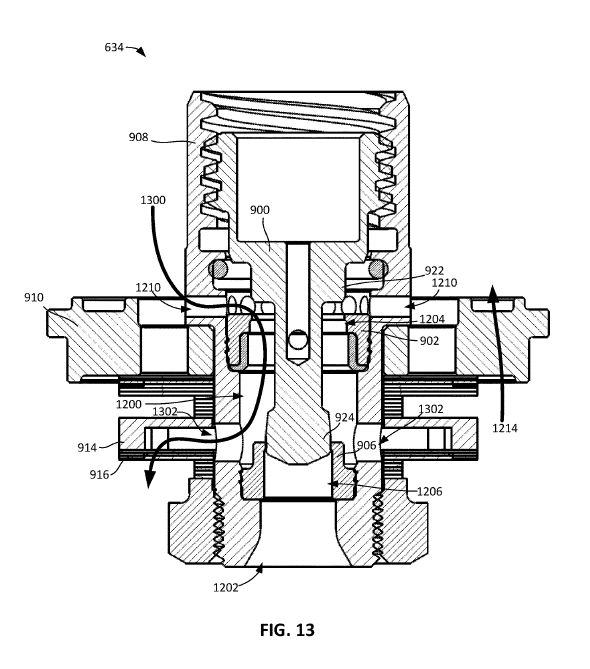
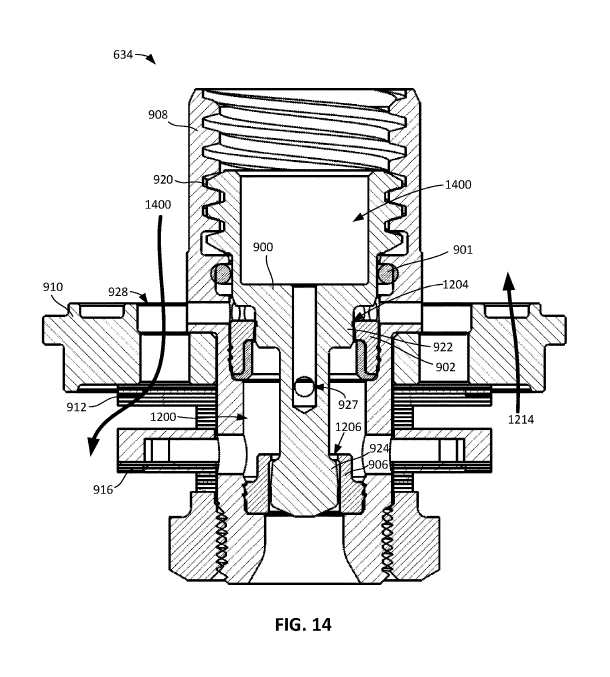
So, as the system senses, all the bike’s information and the controller does it’s calculations, the plug 900 will move up and down really fast to provide the automatic damper adjustment.
Conclusion
I’ve said this before and I’ll say it again: active systems will ruin racing. I’ve also said who gives a fat fuck about if active systems make it to trail bikes – that doesn’t matter at all. The engineers behind technology like this are much smarter than you think. In today’s racing (any high level racing), the majority of speed is created by the engineers, not the riders/drivers. In the current downhill, enduro, XC series, speed is controlled by the riders because there are very few systems helping them. Active systems will do the exact opposite and expose who has the best engineers and best data acquisition processes.
Active systems are banned in every single top racing discipline — F1, MotoGP, LeMans, NASCAR, etc. There are numerous reasons for this. First and foremost, they’re expensive as shit. These systems take teams of engineers to design and maintain. If this makes it to bike racing, we’ll see the little teams get squeezed out almost immediately because they can’t keep up with development and they will certainly go slower. As soon as results start to disappear, so does the money, and you can’t race without money. And the ones that’ll be winning are the ones with money, right now.
Second, these systems make bikes go really fast. In the auto racing world, these systems make the cars too fast. That was a big driver to the ban; viewers don’t want to see people die in front of them so they couldn’t allow the cars to get much faster. As far as bikes go, will these make bikes move so fast that they’re dangerous? Let’s be real, they’re already extremely dangerous, that’s why we like riding and watching. I’m not sure active systems will make the bikes go so much faster that it’ll change the outcome or likelihood of crashes.
Third, they’ll make the racing boring. I’d compare the situation to the current Lewis Hamilton dominance over the last 8-10 years. The results are no longer in the hands of the driver. The engineers are the ones winning F1 races these days, and have been for 20 years. 76% of overall drivers titles have been won by 3 people since 2000. Technology removes parity in racing. It always has and always will. Everyone knows the right answer for speed, who can afford to implement the right answer? Money will dictate results, not talent.
I said this in my last article about Live Valve, but the current biking environment is similar to NASCAR of the 60’s to 80’s. It’s raw and real. It’s rider vs. rider and that’s it. Sure, teams collect data for set ups, but in the end, the riders control the vast majority of the results. Active systems will change that.







Leave a Reply