
In this article, we’ll be discussing a Lean Based Steering System for Use with Tilting Cycle by Saris, US publication 20210362000. The publication date is Nov. 25th, 2021 and the filing date is May 18th, 2021. This patent is not granted.
Brief Summary (tl;dr)
Saris are developing another steering-type trainer, similar to the already released MP1. In this new system, it’s not just a platform for a trainer. Rather, it’s an entire steerable/leaning bike. The system uses a set of curved rails that sit on a set of grooved rollers. This system allows for fore/aft and side-to-side movement, which isn’t unsimilar to the MP1. The centering biasing system is interesting in that it’s a set of wires/cables/something that apply a biasing force to the front of the trainer to bias it upright because there aren’t any spinning wheels.
There is also a high-level explanation of the steering signal calculation in this article. In short, it takes a leaning input and outputs a smoothed steering output for better simulation while you’re working on them gainz.
Background
Part of this document appears to include the Saris MP1 platform that has already been released. This system allows a traditional wheel-off-style trainer to be attached to the platform. The goal of this platform is for “simulating outdoor riding, indoors”. With both fore/aft and side-to-side movement, it can move in any direction based on the leaning of a rider. The idea here is to provide a more natural trainer feeling, while not actually going outside. FIG. 6 shows, what appears to be, this system.

As I say all the time, this was the obvious next step with bike trainers. Honestly, I really hate the feeling of a typical trainer. It feels stiff and cumbersome, but that’s just where we are with this technology. Saris appears to be doing their best to solve the issue. However, the technology is still new, so the price will keep most of us out for now. But, as this progresses, trickle-down technology will be more available to people like me.
Intro
What we’ve got here is a document that shows a few systems, all related to the same general idea of movement of a stationary bike system. First is the already-released MP1, so I’m not going to talk about that; it’s all over the internet. The other system is a full-body bike trainer, which appears to follow the same idea as the MP1, but without using a traditional bike and wheel-off trainer. Currently, there are a few companies trying to do something like this, such as Bowflex with their Velocore and KOM Cycling with their RPV2. But, from what I can tell, neither of these apply a fore/aft movement, which appears to be an explicit advantage of this system.
Why
This.
It is an object of the present invention to enable a user to more realistically experience lateral steering that natural occurs in an outdoor environment when using an item of exercise equipment in an indoor environment… to provide movement of an item of exercise equipment in the lateral plane to enhance the user’s experience when using the item of exercise equipment, while simultaneously providing direction input… to provide a support system for an item of exercise equipment that allows movement of the item of exercise equipment in the lateral plane to enhance the user’s experience, and that can filter out non-tum indicative lateral movement of the exercise equipment from movement that indicates an intentional tum by the user.
What
FIG. 2 shows an iso-view of this new stationary bike trainer system. First, let’s talk high-level stuff. The seat is adjustable both up/down and fore/aft, so you should be able to get it situated to your liking. The handlebars appear to be mounted via a traditional stem bolt structure, so you can put your own bars on it. The bars can also be adjusted both up/down and fore/aft. That’d be insane if they weren’t adjustable like this.

Alright, so let’s get into the meat of this. We’ll focus on the arcuate supper support member 62 and arcuate lower support member 70. These arc-shaped bars are what allow fore/aft and leaning movements. These would be some type of grooved roller system. The gif below shows how it might work. Thanks for DC Rainmaker for this in his review of the MP1, here.

Notice how the lower member (rear) is fixed inside the retainer 74. This allows for the fore/aft movement since it’s on a groove roller, but prevents side-to-side movement. FIGs. 3 and 4 below shows the result of this design.
…the movement of the upper support member 62 relative to the bracket 72 and the movement of the arcuate lower support member 70 relative to the top of stanchion 30, while restrained within retainer 74, allows cycle 18 to tilt in a side-to-side manner when lateral sideward forces are applied to cycle 18 during use.
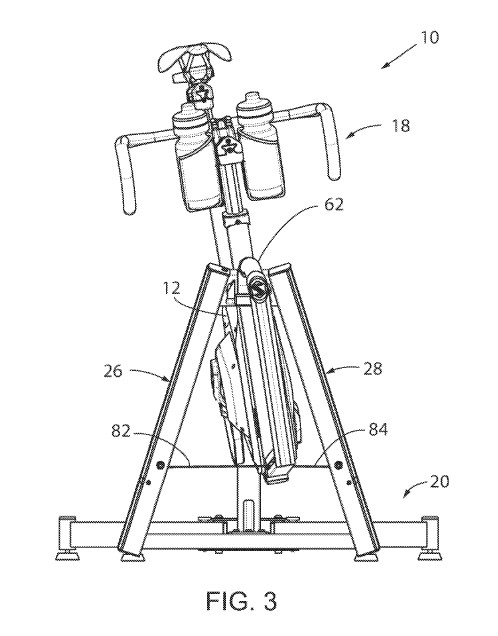
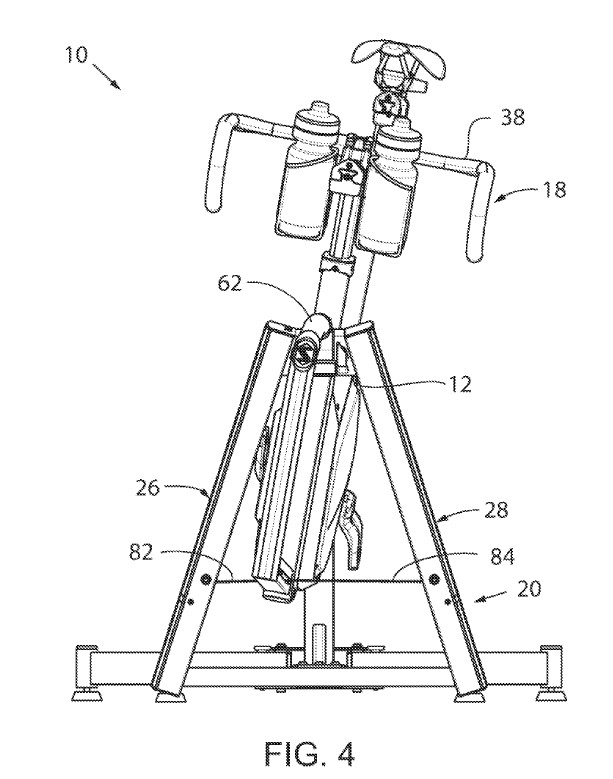
So, how does this thing recenter? As shown in all of these figures, biasing centering cables 82 and 84 provide the pull you’d need for the bike to bias back to the center. I’m unsure as to how these will work, but my guess would either be elastic, cable retractors, or something like that.
So, as the title explicitly says, this is lean-based, meaning there’s a calculation for steering based on leaning. From a very high level, the system takes a steering input (what you do with the bike) and outputs a steering signal to the simulation program (Zwift). The steering input dataset is going to be really noisy due to high data acquisition rates (Hz), so the system has to smooth it out or you’ll get a really fucked up dude on the screen.
…the tilting of the bicycle in a side-to-side manner is configured to produce a signal within the sensor array, which is indicative of steering the bicycle through rider leaning, which may be transmitted as an input signal to a ride simulation program.
The signal is processed (smoothed) through a Kalman filter and a moving average calculation. The Kalman filter just removes statistical outliers, and the moving average calculation applies a 20 period smoothing function, meaning it uses the previous 20 periods to create a moving average. That moving average is then further processed for peaks and determines a midpoint of the peaks to continue to smooth the steering input.
A time average is then applied to this smoothed dataset. So, now we have a super smoothed dataset. A square function (multiplied by itself) is then applied to the dataset to amplify the data. Then a steering threshold modification is applied, which is:
…multiplying the data output from step 230 by a multiplier of approximately 0.545, then raising the resultant base to the exponent of approximately 1.3 and reapplying the sign of the output values from the output of step 226 to generate a steering signal 212.
I have no idea how they got those numbers (probably testing), but that’s the final modification to the data set to get a desired steering output signal. If I had to guess, these calculations happen almost instantly, so you shouldn’t even notice.
FIG. 14 shows a graph of an example dataset, prior to processing. This is what needs to be processed, as explained above.

FIG. 16 below shows a final output of the steering signal, with various steering magnitudes, after processing. For example, 246 is a large turn, 248 is a small turn, 250 are smoothed transitions, and 252 is obviously a straight (non-turn).

Conclusion
Again, this is the obvious next step. What hits me with this one is where we are in cycling. Just take a step back and appreciate what this thing actually does. We’re currently living in a moment in time where health and fitness are expressly prioritized in a large number of people’s lives. Additionally, we’re also living in a time where computing power, sensor arrays, and overall R&D have become much more affordable. Both of these factors contribute to technology like this being available to the public for household use.
More importantly, the financing for ideas like this is becoming more accessible to companies that can produce these products. I don’t mean bank financing; I mean consumer financing. The tech is here, and we’re willing to pay for it.
When I was growing up, you’d never see anyone with equipment like this in their house; it just wasn’t prioritized by the general population and was too expensive. Nowadays, these are commonplace, with some people having entire rooms committed to simulation cycling. I mean, we’re getting really close to almost perfect outdoor riding in our homes. That’s crazy to think about. With home simulation software, proper AI/algorithms, high-level equipment, and finally, financing, this idea of extremely high-performing in-house cycling equipment isn’t space-age anymore. We can just go buy it.







Leave a Reply